Küpsetatud anoodipuhastusrobot





Küpsetatud anoodipuhastusrobot
Küpsetatud anoodide puhastusrobot on kunstlik intelligentne poleerimisrobot, mille on välja töötanud meie ettevõte ja mille eesmärk on alumiiniumisulatustehaste küpsetatud anoodide puhastamise ja poleerimise ajal karm töökeskkond.
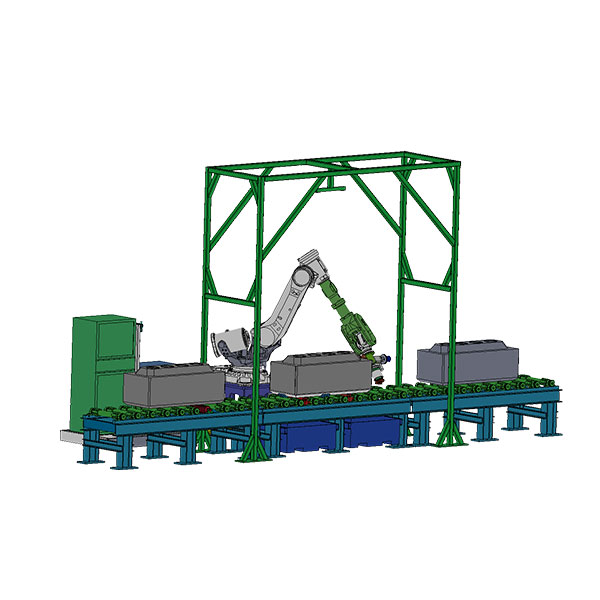
Süvaõppekaamera pildistab anoodiplokke, peale pilvetöötlust ja 3D-pildistamist saadab robotile anoodiplokkide kolmemõõtmelised koordinaadid, seejärel puhastab robot anoodiplokkide pinnad, tünniaugud ja flöödid, tolmukogumisseade võtke pakkimiskoks välja, kuni robot puhastab auke.
Süsteemi konfiguratsioon
1 Visuaalne kujundamise süsteem ja tarkvara
2 Robot ja poleerimissüsteem
3 Tolmu kogumine ja elektriline juhtimissüsteem
4 Anoodplokkide transpordisüsteem
Eelised
1. Intelligentne reaalajas taju
Meie ettevõtte poolt sõltumatult uuritud ja arendatud süvaõppe algoritm suudab reaalajas tajuda süsinikplokkide asukohta ja roboti liikumisolekut, et kohandada roboti poleerimistoiminguid.
2. Paindlik poleerimine
Ujuvfreesis olev hari võimaldab robotil eemaldada anoodiplokkide pinnale kergelt kleepunud pakkimiskoksi ilma süsinikplokke kahjustamata.
3.Puhastage ilma tolmuta
Tolmukogumisseade võib eemaldada anoodiplokkidelt eemaldatud pakkekoksi ja käsitsi puhastamist pole vaja.
4.Põhjalik puhastamine torude aukudes
Toru aukudes olevad sooned puhastatakse freesiga, mis suudab pakkekoksi pulga seest põhjalikult puhastada.

Kärnaugude puhastamise tehnoloogiad
1.Flöödipuhastusfreesi komplekt
Tünniaugu renni puhastamise lõpetab suurel kiirusel pöörlev frees, millega saab puhastada pakkekoksi.
Löögijõud puudub, vältige tõhusalt manipulaatori löögikahjustusi ja tagage manipulaatori töö täpsus.
2. Intelligentne sensormehhanism
Spiraalkaabits on varustatud kiiruseanduriga.Kui sees on rauda
pakkides koksi, väheneb kiirus kiiresti, et lõpetada jahvatamine ja anda an
äratus.
3.Stub augu imemise mehhanism
Spiraalne kaabits võib kraapida lahti pakkekoksi tünniaugus ja tihendi
koks imetakse ära keskel asuva imitoru kaudu.
Anoodpindade puhastamise tehnoloogiad
1. Jõuga juhitav ujuv puhastusmehhanism
Survejõu realiseerib silinder, mida juhib piesoelektriline proportsionaalne klapp, kõrge tundlikkusega ja kiire reageerimisega.
2.Kuuli ülekandemehhanism
Jõuülekanne kasutab kuulülekannet, suure rõhu juhtimise täpsusega, väikese pöörleva hõõrdusega ja ilma tööriistade kinnituseta.
3. Lõikepea nurk ujub
Lõikuripea hõljub nurga suunas, et lõikepea sobiks tihedalt töödeldava detailiga.
4. Omandamine ja intelligentne juhtimine
Kiiruse ja nihke anduritega antakse tööprotsessi ajal reaalajas tagasiside signaale, et muuta erinevaid lihvimisparameetreid reaalajas
saavutada parim puhastusefekt.
5.Isekaljuv funktsioon
Programmil on iseõppimise funktsioon.Mida rohkem andmeid andmebaasi koguneb, seda parem on lihvimisefekt.
6. Lõikuri disain ja materjali valik
Lõikuripea on valmistatud Cr12 legeerterasest, mis on kindel ja vastupidav.Tera ots on viimistletud volframist terasest tera, mida on lihtne vahetada.